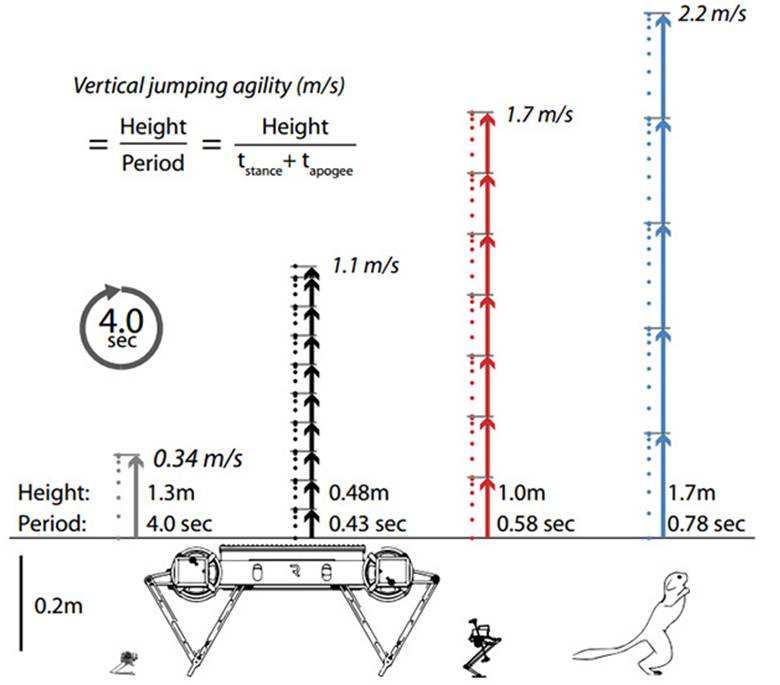
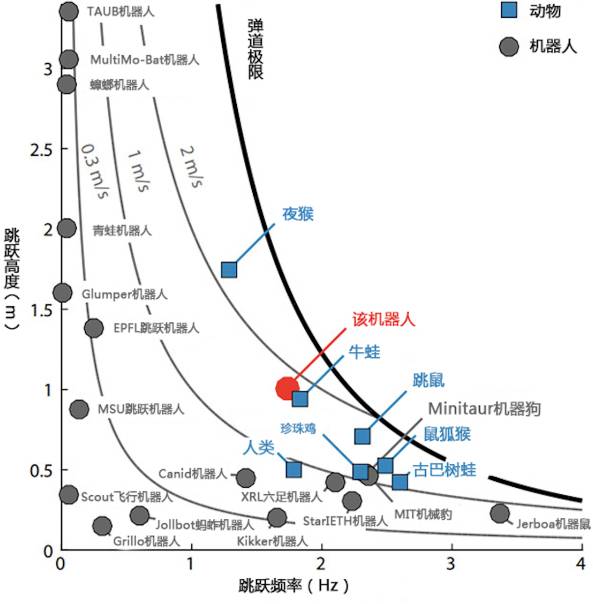
為了達到高度敏捷性,不僅要跳的高,還要跳的頻繁。例如,瑞士洛桑聯邦理工大學(EPFL)開發的蚱蜢仿生跳躍機器人的垂直跳躍高達1.3米,但卻只能每隔4秒跳躍一次,所以其敏捷性很低。相比之下,賓夕法尼亞大學(University of Pennsylvania)開發的四腿跳躍機器人Ghost Minitaur跳躍高度只有0.48m,卻能夠每0.43秒跳躍一次,所以儘管其跳躍高度較低,但是其敏捷性卻較高。
參考:「Robotic Vertical Jumping Agility ViaSeries-Elastic Power Modulation,」 by Duncan W. Haldane, M. M. Plecnik, J.K. Yim, and R. S. Fearing from UC Berkeley, was published today in thevery first issue of Science Robotics.





 狗仔卡
狗仔卡






 提升卡
提升卡 置頂卡
置頂卡 沉默卡
沉默卡 喧囂卡
喧囂卡 變色卡
變色卡 搶沙發
搶沙發