|
|
基於電池外特性的模型,已經有較多文獻涉及,最常見的性能衰減模型是基於Arrhenius規律的模型。Toshiba的手冊中給出了鈷酸鋰電池貯存壽命模型

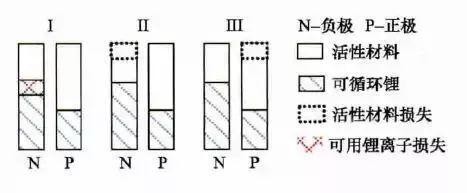
式中,Closs為容量損失百分比,%;T 為溫度,K;t 為時間,月。Bloom等進行了不同環境溫度下電池衰減率的試驗與分析,試驗了以溫度為加速應力的電池容量衰減模型,討論了電池容量保持率與環境溫度和循環時間的關係,提出
式中,Qloss 為阻抗增加率(area specific impedance ,ASI)或最大輸出功率,W/s或W;A 為常數;Ea為反應活化能,J;R 是氣體常量,J/(mol·K);T 是絕對溫度,K;t是時間,h;z 是時間模態,簡單情況下可取1/2。其中A、Ea/R、z 都可以通過試驗數據用擬合的方法得到。
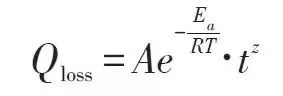
Wang等基於Bloom等的工作,提出了以Ah 循環總量為變數的雙因素模型,將放電倍率乘入原有的時間項,得到以溫度和放電倍率為加速應力的電池壽命模型,實現了雙應力加速下20%以內的預測誤差,即
式中,Qloss為容量損失百分比,%;Ah 為安時循環總量,Ah;其他參數的定義與前面公式相同。
Matsushima研究了大型鋰離子電池的性能衰減,發現容量的衰減與時間呈1/2次方關係,即Qloss=Kf×t^(1/2),並發現容量衰減在30%以內時的係數Kf與容量衰減大於30%時的係數Kf不相同。前者較大,說明前30%容量衰減的速度快。Kf服從阿倫尼烏斯定律。進一步地,基於Arrhenius模型的擴展模型,如黎火林、蘇金然根據對鈷酸鋰電池循環壽命的試驗,提出了如下的Arrhenius擴展模型:

式中,Cτ為容量衰減率,%;nc為充放電循環壽命,次;T 為絕對溫度,K;I 為放電電流,A;a、b、c、l、m、f、α、β、λ、η均為常數,可以通過試驗擬合確定。
Li等考慮了電池壽命的多個影響因素,如環境溫度、放電倍率、放電截止電壓、充電倍率和充電截止電壓等,提出了基於耦合強度判斷和多因素輸入的壽命建模方法(模型中溫度的影響也參考了Arrhenius建模方法、電物理量的影響參考逆冪規律),並基於模型的因素敏感性分析了各因素對電池壽命影響的權重,耐久性模型對電池壽命的預測誤差為15%以內。
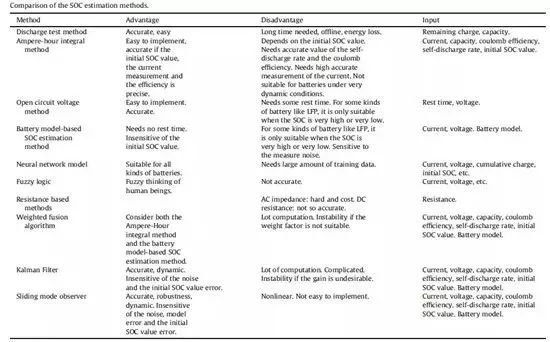
Han等在分析電池性能衰減基礎上,認為以石墨為負極的鋰離子電池的性能衰減主要是因為負極SEI膜增厚消耗活性鋰離子,正常的SEI膜增厚消耗的鋰離子與時間呈1/2次方關係,但一般電池存在疲勞龜裂消耗了更多的活性鋰離子,因此性能衰減與時間的關係大於1/2 次方。
基於Arrhenius模型建立了4款以石墨為負極的鋰離子電池的性能衰減離散模型,並提出基於該離散模型的閉環參數修正方法,經過幾次容量修正後,模型參數趨於穩定。
其他外特性建模方法還有神經網路模型,如Jungst等在研究以LiNi0.8Co0.15Al0.05O2為正極材料的電池貯存壽命時建立的神經網路模型。借鑒機械疲勞研究成果,Safari等採用機械疲勞研究中常用的Palmgren-Miner(PM)法則預測電池容量在簡單和複雜工況下的衰減情況,並與損害時間累計法(capacity-lossaccumulation over time,LAT)進行比較,結果表明PM法好於LAT法。
2)基於電池模型參數辨識法
參數辨識方法主要基於已有的電池模型,採用最優狀態估計技術,如最小二乘法、卡爾曼濾波等演演算法,根據運行的數據,對電池模型參數如容量、內阻等進行辨識,從而獲得電池的壽命狀態。
Plett將內阻和容量作為系統狀態參數,構建了內阻估計狀態方程和容量估計狀態方程。採用擴展的雙卡爾曼濾波方法獲得內阻和容量。Gould也基於卡爾曼濾波方法和線性擬合方法辨識電池模型中的容量,繼而獲得容量隨運行循環數的衰減情況。
還有將電池等效電路模型中的內阻視為低頻阻抗,採用滑模控制技術進行辨識。Remmlinger介紹了一種用於混合動力車的電池內阻在線辨識方法,為了實現在線應用,改進了二階RC模型,然後基於特殊的負載信號(發動機啟動時的短暫電壓及電流),採用線性最小二乘法獲得電池模型的內阻值。Verbrugge認為如果對系統狀態參數、測量參數和噪音的演變過程比較了解,採用卡爾曼濾波優化演演算法來遞歸辨識是最具有代表性的方法。
如果缺乏對狀態參數、測量參數、噪音的全面了解,採用具有時間指數遺忘因子的加權遞推最小二乘法將是一個較為務實的方法。Wang發現Verbrugge採用疊加積分計算電壓的電池模型遞推演演算法在採樣頻率較高時變得不是很穩定。據此改進了電池模型的演演算法,並同樣也採用指數遺忘因子的加權遞推最小二乘法辨識電池參數(開路電壓及內阻等)。
Chiang採用線性或非線性系統控制中常用的自適應控制方法,建立了基於電池等效電路模型的參數估計框架,其中為了便於採用自適應控制技術,鋰離子電池等效電路模型採用狀態方程來描述,可用於在線監測電池內阻及OCV,分別用於確定SOH 和SOC。Einhorn根據ΔSOC=ΔAh/C 的關係,估計容量的大小,方法為:
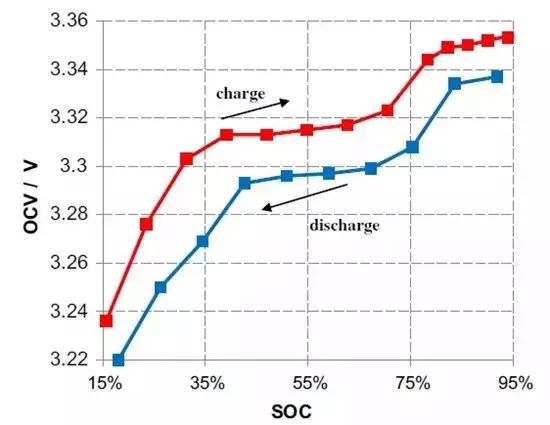
式中,任意兩個時刻(α,β)的SOC 由OCV 查表得到,該方法可在實際中應用,可以取若干個點,兩兩搭配計算出多個容量值,再取平均值或中位數。這種方法比較簡單,但關鍵在於OCV 能否精確辨識。
3)電池組SOH 估計
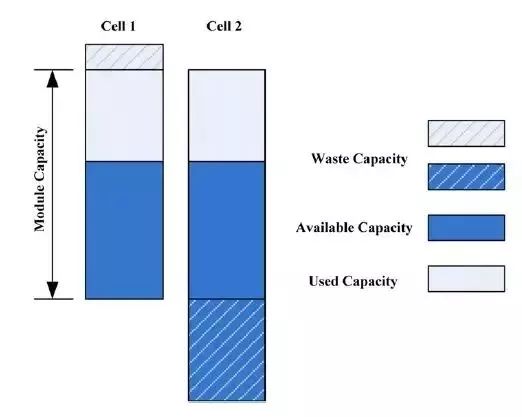
在不進行均衡的條件下,電池組的容量衰減將遠大於單體的容量衰減,鄭岳久等提出用兩維散點圖解釋電池組容量衰減的機理,指出電池組的容量衰減量為剩餘充電電量最小單體的容量損失與單體間負極的活性鋰離子損失差異之和。為了得到電池組的容量,需要首先獲得單體的容量。單體容量獲取可以通過上述基於模型參數的辨識方法獲得,也可以通過充電電壓曲線變換方法獲取。
3.4 功能狀態(SOF)估計
估計電池SOF 可以簡單認為是在估計電池的最大可用功率。一般而言,電池的最大可用功率受到電流、電壓、SOC、溫度等參數的限制,還與電池的老化程度、故障狀態等有關。常用的SOF 估計方法可以分為基於電池MAP圖的方法和基於電池模型的動態方法兩大類。
1)基於MAP圖演演算法
基於電池測試(通常為HPPC測試)數據和最大、最小電壓限制,可以獲得在不同SOC 下的最大充放電功率。在不同溫度、不同衰減程度下進行電池測試,可以建立最大充放電功率與溫度、SOC、SOH 的關係,得到最大充放電功率MAP圖。基於MAP圖,實車BMS可以通過插值得到電池的最大充放電功率,實現SOF 估計。
Do等分別研究了不同SOC、溫度、累計放電容量下的最大充放電功率,並建立了最大充放電功率的函數解析式,實現了對SOF 的預測。基於MAP圖的估計方法簡單直接,但需要存儲多維MAP圖,並且只考慮了靜態特性,而對動態工況下的充放電功率估計有一定的局限性。
2)基於電池模型的動態演演算法
根據電池模型,綜合考慮電池的電流、電壓、SOC、功率等限制,可以得到最大充放電電流,從而計算得到電池的最大充放電功率。
韓雪冰根據電池模型,給出不同電流輸入情況下電池的端電壓情況,通過迭代計算,獲得電池單體在電壓限制條件下所允許的最大電流Imax,voltage 和最小電流Imin,voltage,並且從電池的機理出發,考慮了電池副反應速率限制下的最大最小電流,其方法類似於求取端電壓限制下的最大充放電電流。最後綜合考慮上述限制,獲得電池單體的最大最小電流。
Sun 等分析比較了幾種最大可用功率預測方法,包括HPPC法、SOC 限制法、電壓限制法,以及基於動態模型的多參數估計法,並通過HPPC測試得到充放電電阻,基於Rint模型,利用端電壓限制,估計電池的最大充放電功率。但這種方法估計的實際上是瞬時最大功率。並且由於Rint模型不夠精確,可能過於樂觀地估計了功率,還可能引起過充過放。
與前述方法基本相同,Sun等認為若允許的SOC 變化範圍很大,計算出的最大最小電流可能很大,並不合理,應與其他方法聯合使用。
電壓限制法考慮在端電壓限制下一段時間內的最大充放電功率,但仍使用了Rint模型,原理上與前述方法類似,只是演演算法上並沒有採用迭代估計的方法,而是基於模型直接計算電流限值。基於動態模型的多參數估計方法實質上是基於Thevenin模型的電壓限制法,綜合SOC 與電流的限制,進而得到最大充放電電流。
以上是獲得電池單體最大充放電電流的方法。實車上電池組由眾多電池單體組成,由於單體之間存在不一致性,若要單獨計算每個電池單體的最大可用功率,計算量太大,
韓雪冰提出了充、放電關鍵電池單體的概念,以減少計算量。綜合考慮各種限制條件,可以得到最終的最大最小電流Imax,total和Imin,total,將Imax,total、Imin,total代入電池模型中可計算得到對應的端電壓Umax,total,Umin,total,進一步可以得到最大充放電功率,即
3.5 剩餘能量(RE)或能量狀態(SOE)估計
剩餘能量(RE)或能量狀態(SOE)是電動汽車剩餘里程估計的基礎,與百分數的SOE 相比,RE 在實際的車輛續駛里程估計中的應用更為直觀。
在電動汽車使用過程中,電池的剩餘能量(RE)是指以某一工況行駛時,從當前時刻直至電池放電截止過程中,電池累計提供的能量。RE 可以由電池端電壓Ut與相應的累積放電容量Qcum組成的坐標繫上的面積表示,如下圖所示。
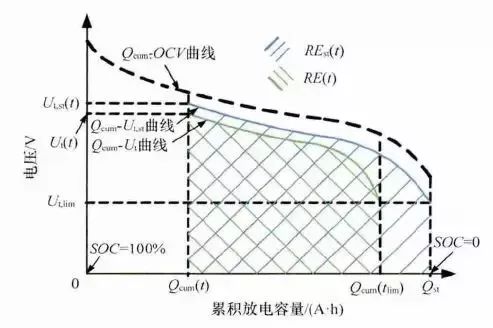
電池剩餘能量示意圖
當前時刻t 的電池端電壓為Ut(t),放電截止時刻記為tlim,對應的端電壓為電池允許的最低放電電壓Ut(tlim)。當前時刻的荷電狀態為SOC(t),已累積的放電容量為Qcum(t)。
放電截止時刻tlim 對應的SOC 和累積容量分別記為SOClim和Qcum(tlim)。圖中,端電壓變化表示為綠色曲線,曲線下圍成的(綠色斜線)面積對應電池當前時刻在此種工況下的剩餘能量RE(t),其計算過程對應公式如下。

由於不同的充放電情況對應的端電壓響應不同,使得電池在同一時刻t 提供的剩餘能量RE(t)也不相同。此處用一組標準電流倍率下的放電情況作對照,標準情況的端電壓Ut,st如圖中藍色曲線(Qcum-Ut,st)所示。由電池SOC 和標準放電容量的定義,此時放電截止位置的SOC 值SOClim,st為0,累積放電容量Qcum,st等於電池標準容量Qst。
標準放電工況下對應的剩餘能量REst(t)與之前的RE(t)有明顯的差距。電池剩餘放電能量的差異同樣可以由當前的RE(t)與理論上最大的剩餘放電能量(電池開路電壓OCV 曲線圍成的面積,圖中黑色虛線所示)進行比較。
不同放電工況下電池的能量損失不同,因此只有預測某一特定功率需求下的電池電壓響應過程,才能獲得準確的RE預測值。由於鋰離子電池的特點,其電壓輸出受到很多變數的影響,如當前SOC、溫度、衰減程度SOH,因此在能量預測過程中除傳統的SOC 估計模型外,還需要一個專門的電壓預測模型。
劉光明等提出一種適用於動態工況的電池剩餘放電能量精確預測方法EPM(energy prediction method),如下圖所示,該方法基於當前的電池狀態和未來的電流輸入,根據電池模型對未來放電過程的電壓變化進行預測,並計算放電過程中的累積能量。預測過程中,根據當前的電壓、電流測量值對模型參數進行修正,對端電壓序列與RE 的預測結果進行更新。
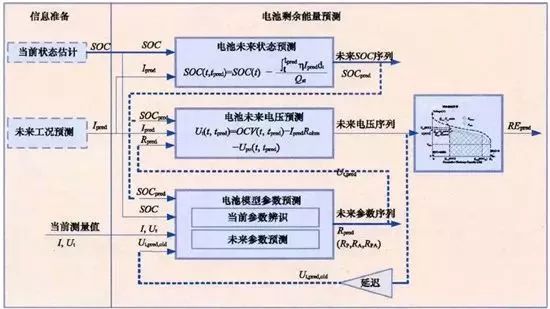
電池剩餘放電能量預測方法(EPM)結構
3.6 故障診斷及安全狀態(SOS)估計
故障診斷是保證電池安全的必要技術之一。安全狀態估計屬於電池故障診斷的重要項目之一,BMS可以根據電池的安全狀態給出電池的故障等級。目前導致電池嚴重事故的是電池的熱失控,以熱失控為核心的安全狀態估計是最迫切的需求。
導致熱失控的主要誘因有過熱、過充電、自引發內短路等。研究過熱、內短路的熱失控機理可以獲得電池的熱失控邊界。Feng等研究了一款三元電池的熱失控行為,獲得了3個特徵溫度。Ouyang等研究了一款複合三元材料電池的過充電熱失控行為,獲得了4個過充電特徵階段。這些研究為電池的安全狀態估計提供了基礎。
故障診斷技術目前已發展成為一門新型交叉學科。故障診斷技術基於對象工作原理,綜合計算機網路、資料庫、控制理論、人工智慧等技術,在許多領域中的應用已經較為成熟。鋰離子電池的故障診斷技術尚屬於發展階段,研究主要依賴於參數估計、狀態估計及基於經驗等方法(與上述SOH研究類似)。
Bohlen等通過電池內阻模型的在線辨識實現了電池在線診斷。Sun等鉛酸電池的健康狀態(SOH)上,假設正常狀態的恆流充放電電壓曲線是光滑的,通過觀察其充放電曲線的變化辨識電池組可能存在的故障。電動汽車動力往往由成百上千個電池單體串並聯構成,個體之間存在一定的差異,即不一致性。一般地,不一致性服從統計分佈規律,這為電池組的故障診斷提供了一種理論依據。
Zheng等建立了一種考慮接觸電阻的電池分頻模型,以代表低頻的電池平均模型研究電池組總體行為,以代表高頻的差異模型研究電池組一致性問題,成功辨識了電池組內的接觸電阻故障。Ouyang等同樣採用分頻模型,通過內短路電池造成一致性變差特性來診斷內短路的發生。
文章來源:動力鋰電池網
|
|





 狗仔卡
狗仔卡





 提升卡
提升卡 置頂卡
置頂卡 沉默卡
沉默卡 喧囂卡
喧囂卡 變色卡
變色卡 搶沙發
搶沙發 樓主
樓主